Undergraduate Projects
My undergraduate robotics projects are presented here with a brief introduction.You can contact me for further details.
01
Design and Development of a Multitasking Intelligent Robotics Platform with a Manipulator and Attachable Passenger Carrier for Hospital Environment
Project carried out @University of Moratuwa
As the final year undergraduate project, a mobile manipulator robot has been developed. The robot consists of a mobile platform(AGV) & manipulator. The robot can be controlled from a remote location through IoT. IBM Watson ML has been used during the development of the intelligent control system. The following video shows different features of the robot including manipulator, mobile platform, and intelligent control system.

02
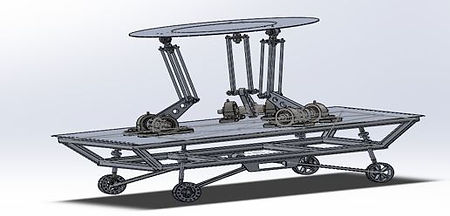
Design and Development of a Self Balancing Moving Platform for a Food Delivery Robot
Project carried out @University of Moratuwa
The objective of this mechatronics system design project was to keep the food-carrying platform of a delivery robot horizontally during transport. Designed a parallel arm system consisting of a 3-RRS mechanism and a closed-loop control system. Design and simulations were carried out using different software packages. Further, a prototype was fabricated using an Arduino control unit along with proximity and gyroscope sensors.


03
Development of a Mobile Robotic Platform with Multi Operating Modes(line tracking, obstacle avoiding,sign detection,manual controlling using a bluetooth mobile app)
In this mini-project, a small-scale mobile robotic platform has been developed focusing on control system implementation and simulations.At first simulations were carried out in order to test control algorithms using WeBots simulation platform.
The mobile robot has several operating modes.Using a mobile application developed using Flutter, user can change the operating mode.In the line following mode, it can follow a black color track and changes speed of the robot after detecting two types of signs.This sign detection part is implemented on a Raspberry Pi 4 Module with a Pi camera module using Tensorflow lite. Addition to that it can avoid obstacles in the surrounding environment using proximity sensor data. In the manual operating mode user can navigate the robot using the mobile app through a bluetooth connection.

Obejct avoidance simuilation - WeBots

Line following simulation - Webots
Testing with prototype robot

Obstacle avoidance
04
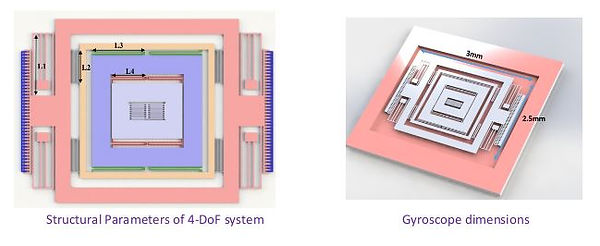
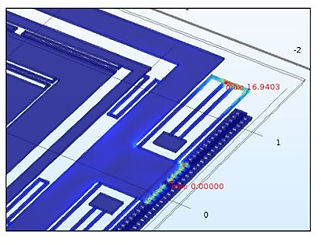
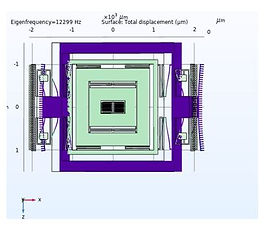
Design and Simulation of a 4-DoF MEMS Vibratory Gyroscope Sensor
In this project, Micro Electro Mechanical Systems(MEMS) based gyroscope sensor developed. The device is electrostatically actuated and uses change of capacitance in a parallel plate structure to measure angular rates. A conference paper has been published based on this work.